您现在的位置是:主页 > pg电子娱乐 >
用于选择ADI产品30周年的磁ADA传感器457(AMR)
发布时间:2025-07-18 14:06编辑:bet356体育官方网站浏览(102)
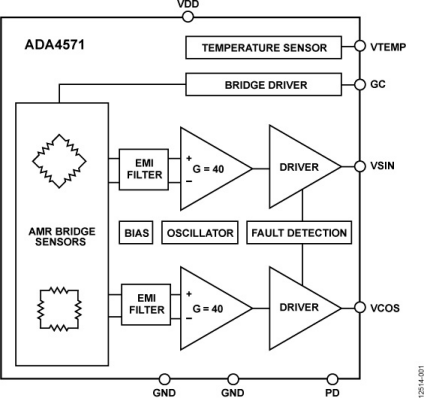 1。简介ADA4571是一种各向异性磁传感器(AMR),它集成了信号调节器和ADC控制器。 ADA4571产生两个模拟输出,指示周围磁场的角度位置。 ADA4571将两个芯片集成到一个包装中。也就是说,它将AMR传感器与固定增益仪器放大器(标称G = 40)集成在一起。 ADA4571为旋转磁场的角度提供了干净,放大的余弦输出信号和乳房。输出电压范围与电源电压成正比。传感器以45°的角度包括两个小麦SDEN桥。 X-Y传感器平面的旋转磁场提供了两个正弦波出口,是传感器的角度(α)的两倍和磁场的方向。在X -Y平面的均匀场中,输出信号独立于方向的物理位置(空间空间)。ADA4571可在8 -pin soic soic pac中使用Kage。产品功能1。接触角度测量。 2。测量磁场的方向,而不是磁场密度。 3。对空气空间变化的敏感性非常低。 4。工作距离很长。 5。即使饱和的田地也具有出色的精度。 6。生命的热漂移和漂移非常小。 7。磁滞可以忽略。 8。芯片解决方案。 2.技术文章增加了成本,并且像其他工程领域一样,也增加了对小型和长距离产品的客户的需求,受弹药系统的限制。为了有效地驱动和控制飞行中的这些弹药,通过小型控制驱动系统(CA)进行小精确设置,以确定鳍片的位置并调整弹丸的空气流量。从传统上讲,这些系统是由CC发动机驱动或驱动的,它是由变速箱刷的,但在不带CC Motors(包括CC Motors)的最新进展(包括Brusses,Bruss)(BLDL CC US)(blds)(Blds)(blds)(Blds)(bell brestes)(bell bruss)(bell bress),设计较小,更便宜,更高效的受控驱动系统。但是,由于CC发动机的三个阶段是没有刷子的三个阶段,因此成本是增加系统的复杂性。它增加了复杂性的原因有几个。首先,传统的刷牙CC发动机仅需要H桥,但是没有刷子的CC发动机需要三个独立的MOSFET来增强相位。这增加了少量成本,需要在PCB板上额外的空间。驾驶这些MOSFET时,重要的是要注意不要同时打开更高和较低的MOSFET。否则,通道短路电流会损坏MOSFET。应特别注意在脉冲宽度调制(PWM)的上下驱动信号之间插入死时间。从软件的角度来看,您可以使用lole简单的循环来控制传统的刷子发动机,但是没有刷子的CC电动机需要更高级的循环和相位巧合策略。这通常是衡量的URES绕线电流,相电压,转子角度和速度。 CC电动机结构没有扫帚CC发动机,没有刷子,是指定的电磁体集合,永久磁铁连接到旋转转子上。发动机可以是内部转子发动机(磁铁在线圈内)或外转子发动机(磁铁不在线圈中)。图1显示了CC在转子发动机内部没有刷子和发动机中使用的外转子的发动机。在这两种情况下,都会在定子的牙齿周围插入三个相电缆(U,V,W或A,B,C)。这些绕组反过来又能吸引和排斥永久磁铁(红色/蓝色)。图1。内部转子发动机和外部转子电动机。标准微处理器或DSP的当前驱动强度不足以直接驱动线圈,因此通常用于将控制界面的PWM驱动电流转换为需要使用喂养投资者阶段COSSI的发动机,该发动机需要高压驱动电流MOSFET的刺激(每个两个阶段两个阶段)。通常,在三个阶段逆变器中,六个n通道的MOSFET(请参见图2的顶部)用于形成图2的下部显示的开关状态。图2中没有显示一些开关状态:001、010、011、011和101。1意味着三个高级MOSFET中的一个意味着一个较高的MOSFET。这些状态显示在图3中的六核中。因此,分配了状态空间的表示。打开和关闭开关时,施加到绕组的电压最多可达2/3xVDC。这种策略的自然扩展是PWM可以应用于每对MOSFET。通过更改PWM波形的工作周期,绕组产生的电压可以根据PWM生成系统的分辨率产生广泛的电压。图2。三相逆变器和开关状态。图3。状态空间开关的表示以及扇区I和扇区VI之间的分布。在缺席的情况下在PWM中,一种非常自然的纠正策略仅仅是为了刺激每对绕组(即阻塞整流或六阶段的整流)。在此策略中,一个或两个阶段减少,其余的绕组被驱动。连续启动相位,并且在每个阶段都抛出转子中的磁铁,使转子开始转动。为了确定激发阶段,通常将三个霍尔效应传感器安装在定子中,三个以60度的电角度分离。房间效应的这些效果检测到每个转子磁体并产生三位数的序列。这用于确定以下整流器区域。该策略适用于低成本的电机控制系统,但在慢速下受到扭矩搏动的影响。另外,当发动机用于定位/伺服应用时,这种扭矩脉动会导致噪声并可能导致位置误差。正弦波相的运行原理是重合W带有CC发动机的定子流动的定子电流,没有刷子。没有刷子的CC发动机基于梯形电流通过绕组的运动。这些电流之间的相位为120°。同步永久磁铁发动机(PMSM)与无刷子的CC电动机相似,但需要正弦波电流才能驱动它们。图4显示了永久磁铁同步发动机的功能框图。通过基于速度传感器或位置轴传感器和电机参数的估计来实现简单的速度控制。正弦波传导在慢速下特别有效,但还需要正弦波的所需电频率随速度增加,因此它以高速分离。在高速时,发动机需要更大的扭矩并可以实现相电流。 2对于高速控制,通常应引入相电缆以正确对齐扭矩和流量向量。 figuRE 4:Magneti同步发动机符号地址Co Yong。为了克服这个问题,可以使用一个更复杂的控制方案,称为磁场管理(FOC)。像其他纠正策略一样,可以在不使用传感器的情况下实现它,这取决于控制绕组产生的反电场方向产生的逆电能的位置和速度,并且位置和电流传感器也可以在传感器的解决方案中实现。磁场的管理控制基础是控制进入发动机绕组的扭矩和流量向量。这些生成的向量来自所需的引擎入口。使用发动机的电气和机械常数(惯性矩,摩擦系数,定子绕组的电感和电阻和恒定电动势倒数),图5中所示的PI环将所需速度转换为DC。对于contsmell e的电循环Ngine,这些量必须成为转子的参考框架(图6),并且必须在公园转换中产生Vα和Vβ。该领域指导控制的下一步是将Vα和Vβ转换为发送给PWM投资者单位的PWM值。该过程通常使用正弦波调制方案(SPWM)或空间向量调制方案(SVPWM或SVM)。图5。1是控制磁场方向的功能框图。图6。控制磁场管理控制中控制参数的转换。如上所述,控制馈电逆变器的MOSFET开关,可以形成空间向量的表示形式,如图所示。 3。对相邻细胞向量之间的空间进行编码,以产生与整流器电循环的六个开关扇区之间的1至6个扇区。图7显示了图3中第一个扇区的关闭 - VREF电压矢量由Vα和Vβ伏特组成ge向量,角度θ是VQ的VD比。 3图7显示,VREF使用两个相邻的细胞向量(V1和V2)在给定时间(对应于工作周期),将其保留在每个状态。该工作周期的使用方式与向量数学类似(派生的方程式)使用。它可以计算(见图8)。图7。状态空间的扇区1。图8对于向量方程计算,V,W。根据图7的方程,我们可以获得参考矢量扇区时间的PWM时间,假设归一化时间为1.0(相当于完美的工作周期100%),并且减去TN和TN+1。该部门可以通过其他计算来确定,如图9所示。图9。该部门的决定。一旦计算了工作周期并将其发送到控制器的PWM模块,就可以使用磁场的管理控制来实现开路控制。为了实现闭路控制,必须集成反馈。如图库所示E 4,测量了三个绕组中的电流,并使用Clark的反向转换和反向公园。您可以使用几种不同的策略来测量这些电流。派生检测与每个相绕组并联进行。在三个Mosfett和下面的地面之间的低端倒车。每个地球MOSFET下的相位派生。或每个较高和VDC之间的高电压侧向推导。如果设计受到成本的限制,那么最好使用两个平行推导与绕组进行限制,因为这是一种直接测量两个绕组之间电流的简单方法。第三电流Isyou可以用于当前的龙骨法则计算总数为0。另一个优势是,当电流可以随时测量,而不是启用较低或更高的MOSFET时。测量这些电流后,必须使用推导系统可以测量的最大电流在[-1,+1]中进行标准化。您可以使用编码器(相对Or绝对),房间效应传感器,旋转角度或磁角传感器的位置和速度位置。但是,根据传感器的分辨率,可能需要其他位置和速度估计方案。无论使用哪种技术,测得的角度都必须成为电角,并且相巧合必须与转子的真实位置同步,从而导致转子转换。您还必须知道角速度,但是这个术语通常在机械区域中与速度级入口相匹配的机械区域。如果已知转子的真实位置和速度,请进行反向/反向公园和克拉克的转换,以使固定状态定子的坐标坐标系的转子转换为参考系统D,哪个相电流可以转换为Lee坐标系。对于产生的当前和速度误差的术语,PI周期形成错误向量,然后返回到公园前进和Clark的转换,这允许重复控制过程。那么,您需要多快地重复该过程呢?答案取决于发动机特性。通常,PWM频率被选择在可听见范围以上(30 kHz时15 kHz)以防止发动机发出可听见的人耳。磁场的管理和所需的控制回路是在PWM中断服务程序中实现的,该程序允许新的ValuePWM用于下一个PWM周期。这会导致严格的时间限制以现场为导向的控制例程,因为Servomotos的时间不利用花费的时间来中断伺服PWM(例如PC程序的串行接口)。在30 kHz的PWM频率下,每个PWM ISR仅为33.3 µs。您会看到每个微秒非常重要!应该注意的是,应最大程度地减少正弦计算和余弦计算超载和其他浮点计算。通常,最好维持场定向CONTROL例程不到50%的PWM ISR时间可用,因此处理器可以提供其他外围设备(例如UART)来处理不太重要的任务,例如更改所需速度或建立新位置。所选组件字段的指导控制的实现已经很复杂,因此,仔细选择组件可以最大程度地减少系统集成中的降低fios。 ADI提供了各种用于发动机控制信号的设备。这些组件包括门控制器,绝对角度效应传感器,电流传感器和分离产品。图10显示了电动机控制信号集的简单功能框图。在高水平上,使用ADA4571 AMR角度传感器和磁场传感器AD22151用于检测无刷子的直流发动机轴的位置和速度。使用线阻力在线和AD8418感觉轴向功率测量相绕组电流。 ADC LTC2345-18 8x18位转换六个模拟传感器向数字微控制器电压的电压。微控制器使用这些信号来计算PWM工作周期并将其发送到硬件计时器。 Countrolator LT1158 MOSFET是电源逆变器中六个MOSFET的门控制器。图10。电机控制信号链的功能框图。 LT1158是集成的中桥管的MOSFET控制器。电源电压范围为5 V至30 V CC,但是输入PWM形状的逻辑可以接受TTL或CMOS级别。此外,单个PWM输入变为高和低MOSFET单位符号,并且CHIP自动插入自适应死亡时间。这意味着PWM频率可以动态变化,并且将自动插入死亡时间以保护当前的倒塌MOSFET,而无需更改PWM计时器代码或注册。图11。LT1158MOSFET双控制器N。集成的各向异性磁传感器(AMR)ADA4571可以测量180°的旋转并测量精度WIthin 0.5°。传感器和传感器电源电压在2.7 V和5 V之间,并且在启用温度的补偿下,能源消耗仅为7 mA。传感器输出是两个类似的正弦波(VSIN,VCO),重点是2.5 V(5 V电源)。在将VSIN和VCO电压数字化后,它们可以通过简单的方程式成为角度:图12。ADA4571AMR传感器。为了测量360°的绝对旋转,可以将ADA4571与线性输出磁场传感器(走廊效应)(例如AD22151)一起使用。 AD22151设计用于单个5 V工作电源,其输出电压与垂直于包装的磁场线性成正比。在正常运行期间,该设备的最大输出为10 mA,并且可以检测具有不同增益量的双极或单极场。该传感器的优点反映在模拟输出电压中,并且可以轻松地添加到已经具有ANA的系统中对数测量功能,例如电流传感器输出和其他模拟角传感器。 AD22151垂直放置在ADA4571中,该ADA4571允许该软件融合输出,以检测直径 - 轴磁体的360°运动。像角度传感器一样,使用传感器对磁场的管理控制需要通过无扫帚的直接发动机对相电流进行精确测量。 AD8418是双向零推导的感觉放大器,非常适合此任务。该外部电流放大器的增益为20 v/v,在整个温度范围内运行时,可拒绝范围为-2 V至+70 V。放大器还可以通过推导检测双向电流。该设备的VS电源电压范围为2.7 V至5 V,模拟输出电压围绕VS/2。如果选择了5 V电源,则输出与ADA4571相同的中心为2.5 V。图13。AD8418电流传感器。如果您使用模拟输出传感器,结果必须成为数字域。尽管有多个ADC,但由于其八个同时采样通道,LTC2345特别适合发动机控制。采样与转换线中的单个上升边缘同步。在PWM中心对齐期间,相位电流和绝对角传感器的输出可以同时同步。单个5V供应简化了能源设计,消耗少于20 mA的消费。使用独立的数字逻辑输出电压,LTC2345可以与较低的电压微控制器,处理器或FPGA相互作用。模拟输入范围非常灵活,因此模拟(内部)输入通道可用于用硬件中的2.5 V电流和电流传感器删除Automát。根据所需的采样性能,可以使用SDO输出以几种手表速度从LTC2345获得数据。图14。功能框图LTC2345。结论离子在控制驱动系统中没有刷子的CC电动机的受欢迎程度需要更高级的算法,传感器和驱动电路。正弦和磁场管理的控制是两种相巧合策略,可以精确控制CC电动机,而无需刷子。两种策略都没有刷子的CC发动机的正确转子角度。需要精确测量它。没有正确的组件,这将非常困难。但是,ADA4571和AD22151简化了此测量。 LT1158在减少PWM电路时无需刷子即可简化CC发动机的三个相PWM驱动电路,并消除了对死时间计算的需求。 AD8418简化了绕组电流,而LTC2345简化了多个模拟传感器的数字化和同步。这些组件只是电动机控制应用的ADI投资组合的一部分。 3。下载相关的技术数据1。数据表https://share.eepw.com.cn/share/download/id/3957522, user manual https://share.eepw.com.cn/share/dowd/39575333, application note https://share.eepw.com.cn/share/dowload/id/3957544444 https://share.eepw.com.cn/share for for for for for for for for for for for for Autu
1。简介ADA4571是一种各向异性磁传感器(AMR),它集成了信号调节器和ADC控制器。 ADA4571产生两个模拟输出,指示周围磁场的角度位置。 ADA4571将两个芯片集成到一个包装中。也就是说,它将AMR传感器与固定增益仪器放大器(标称G = 40)集成在一起。 ADA4571为旋转磁场的角度提供了干净,放大的余弦输出信号和乳房。输出电压范围与电源电压成正比。传感器以45°的角度包括两个小麦SDEN桥。 X-Y传感器平面的旋转磁场提供了两个正弦波出口,是传感器的角度(α)的两倍和磁场的方向。在X -Y平面的均匀场中,输出信号独立于方向的物理位置(空间空间)。ADA4571可在8 -pin soic soic pac中使用Kage。产品功能1。接触角度测量。 2。测量磁场的方向,而不是磁场密度。 3。对空气空间变化的敏感性非常低。 4。工作距离很长。 5。即使饱和的田地也具有出色的精度。 6。生命的热漂移和漂移非常小。 7。磁滞可以忽略。 8。芯片解决方案。 2.技术文章增加了成本,并且像其他工程领域一样,也增加了对小型和长距离产品的客户的需求,受弹药系统的限制。为了有效地驱动和控制飞行中的这些弹药,通过小型控制驱动系统(CA)进行小精确设置,以确定鳍片的位置并调整弹丸的空气流量。从传统上讲,这些系统是由CC发动机驱动或驱动的,它是由变速箱刷的,但在不带CC Motors(包括CC Motors)的最新进展(包括Brusses,Bruss)(BLDL CC US)(blds)(Blds)(blds)(Blds)(bell brestes)(bell bruss)(bell bress),设计较小,更便宜,更高效的受控驱动系统。但是,由于CC发动机的三个阶段是没有刷子的三个阶段,因此成本是增加系统的复杂性。它增加了复杂性的原因有几个。首先,传统的刷牙CC发动机仅需要H桥,但是没有刷子的CC发动机需要三个独立的MOSFET来增强相位。这增加了少量成本,需要在PCB板上额外的空间。驾驶这些MOSFET时,重要的是要注意不要同时打开更高和较低的MOSFET。否则,通道短路电流会损坏MOSFET。应特别注意在脉冲宽度调制(PWM)的上下驱动信号之间插入死时间。从软件的角度来看,您可以使用lole简单的循环来控制传统的刷子发动机,但是没有刷子的CC电动机需要更高级的循环和相位巧合策略。这通常是衡量的URES绕线电流,相电压,转子角度和速度。 CC电动机结构没有扫帚CC发动机,没有刷子,是指定的电磁体集合,永久磁铁连接到旋转转子上。发动机可以是内部转子发动机(磁铁在线圈内)或外转子发动机(磁铁不在线圈中)。图1显示了CC在转子发动机内部没有刷子和发动机中使用的外转子的发动机。在这两种情况下,都会在定子的牙齿周围插入三个相电缆(U,V,W或A,B,C)。这些绕组反过来又能吸引和排斥永久磁铁(红色/蓝色)。图1。内部转子发动机和外部转子电动机。标准微处理器或DSP的当前驱动强度不足以直接驱动线圈,因此通常用于将控制界面的PWM驱动电流转换为需要使用喂养投资者阶段COSSI的发动机,该发动机需要高压驱动电流MOSFET的刺激(每个两个阶段两个阶段)。通常,在三个阶段逆变器中,六个n通道的MOSFET(请参见图2的顶部)用于形成图2的下部显示的开关状态。图2中没有显示一些开关状态:001、010、011、011和101。1意味着三个高级MOSFET中的一个意味着一个较高的MOSFET。这些状态显示在图3中的六核中。因此,分配了状态空间的表示。打开和关闭开关时,施加到绕组的电压最多可达2/3xVDC。这种策略的自然扩展是PWM可以应用于每对MOSFET。通过更改PWM波形的工作周期,绕组产生的电压可以根据PWM生成系统的分辨率产生广泛的电压。图2。三相逆变器和开关状态。图3。状态空间开关的表示以及扇区I和扇区VI之间的分布。在缺席的情况下在PWM中,一种非常自然的纠正策略仅仅是为了刺激每对绕组(即阻塞整流或六阶段的整流)。在此策略中,一个或两个阶段减少,其余的绕组被驱动。连续启动相位,并且在每个阶段都抛出转子中的磁铁,使转子开始转动。为了确定激发阶段,通常将三个霍尔效应传感器安装在定子中,三个以60度的电角度分离。房间效应的这些效果检测到每个转子磁体并产生三位数的序列。这用于确定以下整流器区域。该策略适用于低成本的电机控制系统,但在慢速下受到扭矩搏动的影响。另外,当发动机用于定位/伺服应用时,这种扭矩脉动会导致噪声并可能导致位置误差。正弦波相的运行原理是重合W带有CC发动机的定子流动的定子电流,没有刷子。没有刷子的CC发动机基于梯形电流通过绕组的运动。这些电流之间的相位为120°。同步永久磁铁发动机(PMSM)与无刷子的CC电动机相似,但需要正弦波电流才能驱动它们。图4显示了永久磁铁同步发动机的功能框图。通过基于速度传感器或位置轴传感器和电机参数的估计来实现简单的速度控制。正弦波传导在慢速下特别有效,但还需要正弦波的所需电频率随速度增加,因此它以高速分离。在高速时,发动机需要更大的扭矩并可以实现相电流。 2对于高速控制,通常应引入相电缆以正确对齐扭矩和流量向量。 figuRE 4:Magneti同步发动机符号地址Co Yong。为了克服这个问题,可以使用一个更复杂的控制方案,称为磁场管理(FOC)。像其他纠正策略一样,可以在不使用传感器的情况下实现它,这取决于控制绕组产生的反电场方向产生的逆电能的位置和速度,并且位置和电流传感器也可以在传感器的解决方案中实现。磁场的管理控制基础是控制进入发动机绕组的扭矩和流量向量。这些生成的向量来自所需的引擎入口。使用发动机的电气和机械常数(惯性矩,摩擦系数,定子绕组的电感和电阻和恒定电动势倒数),图5中所示的PI环将所需速度转换为DC。对于contsmell e的电循环Ngine,这些量必须成为转子的参考框架(图6),并且必须在公园转换中产生Vα和Vβ。该领域指导控制的下一步是将Vα和Vβ转换为发送给PWM投资者单位的PWM值。该过程通常使用正弦波调制方案(SPWM)或空间向量调制方案(SVPWM或SVM)。图5。1是控制磁场方向的功能框图。图6。控制磁场管理控制中控制参数的转换。如上所述,控制馈电逆变器的MOSFET开关,可以形成空间向量的表示形式,如图所示。 3。对相邻细胞向量之间的空间进行编码,以产生与整流器电循环的六个开关扇区之间的1至6个扇区。图7显示了图3中第一个扇区的关闭 - VREF电压矢量由Vα和Vβ伏特组成ge向量,角度θ是VQ的VD比。 3图7显示,VREF使用两个相邻的细胞向量(V1和V2)在给定时间(对应于工作周期),将其保留在每个状态。该工作周期的使用方式与向量数学类似(派生的方程式)使用。它可以计算(见图8)。图7。状态空间的扇区1。图8对于向量方程计算,V,W。根据图7的方程,我们可以获得参考矢量扇区时间的PWM时间,假设归一化时间为1.0(相当于完美的工作周期100%),并且减去TN和TN+1。该部门可以通过其他计算来确定,如图9所示。图9。该部门的决定。一旦计算了工作周期并将其发送到控制器的PWM模块,就可以使用磁场的管理控制来实现开路控制。为了实现闭路控制,必须集成反馈。如图库所示E 4,测量了三个绕组中的电流,并使用Clark的反向转换和反向公园。您可以使用几种不同的策略来测量这些电流。派生检测与每个相绕组并联进行。在三个Mosfett和下面的地面之间的低端倒车。每个地球MOSFET下的相位派生。或每个较高和VDC之间的高电压侧向推导。如果设计受到成本的限制,那么最好使用两个平行推导与绕组进行限制,因为这是一种直接测量两个绕组之间电流的简单方法。第三电流Isyou可以用于当前的龙骨法则计算总数为0。另一个优势是,当电流可以随时测量,而不是启用较低或更高的MOSFET时。测量这些电流后,必须使用推导系统可以测量的最大电流在[-1,+1]中进行标准化。您可以使用编码器(相对Or绝对),房间效应传感器,旋转角度或磁角传感器的位置和速度位置。但是,根据传感器的分辨率,可能需要其他位置和速度估计方案。无论使用哪种技术,测得的角度都必须成为电角,并且相巧合必须与转子的真实位置同步,从而导致转子转换。您还必须知道角速度,但是这个术语通常在机械区域中与速度级入口相匹配的机械区域。如果已知转子的真实位置和速度,请进行反向/反向公园和克拉克的转换,以使固定状态定子的坐标坐标系的转子转换为参考系统D,哪个相电流可以转换为Lee坐标系。对于产生的当前和速度误差的术语,PI周期形成错误向量,然后返回到公园前进和Clark的转换,这允许重复控制过程。那么,您需要多快地重复该过程呢?答案取决于发动机特性。通常,PWM频率被选择在可听见范围以上(30 kHz时15 kHz)以防止发动机发出可听见的人耳。磁场的管理和所需的控制回路是在PWM中断服务程序中实现的,该程序允许新的ValuePWM用于下一个PWM周期。这会导致严格的时间限制以现场为导向的控制例程,因为Servomotos的时间不利用花费的时间来中断伺服PWM(例如PC程序的串行接口)。在30 kHz的PWM频率下,每个PWM ISR仅为33.3 µs。您会看到每个微秒非常重要!应该注意的是,应最大程度地减少正弦计算和余弦计算超载和其他浮点计算。通常,最好维持场定向CONTROL例程不到50%的PWM ISR时间可用,因此处理器可以提供其他外围设备(例如UART)来处理不太重要的任务,例如更改所需速度或建立新位置。所选组件字段的指导控制的实现已经很复杂,因此,仔细选择组件可以最大程度地减少系统集成中的降低fios。 ADI提供了各种用于发动机控制信号的设备。这些组件包括门控制器,绝对角度效应传感器,电流传感器和分离产品。图10显示了电动机控制信号集的简单功能框图。在高水平上,使用ADA4571 AMR角度传感器和磁场传感器AD22151用于检测无刷子的直流发动机轴的位置和速度。使用线阻力在线和AD8418感觉轴向功率测量相绕组电流。 ADC LTC2345-18 8x18位转换六个模拟传感器向数字微控制器电压的电压。微控制器使用这些信号来计算PWM工作周期并将其发送到硬件计时器。 Countrolator LT1158 MOSFET是电源逆变器中六个MOSFET的门控制器。图10。电机控制信号链的功能框图。 LT1158是集成的中桥管的MOSFET控制器。电源电压范围为5 V至30 V CC,但是输入PWM形状的逻辑可以接受TTL或CMOS级别。此外,单个PWM输入变为高和低MOSFET单位符号,并且CHIP自动插入自适应死亡时间。这意味着PWM频率可以动态变化,并且将自动插入死亡时间以保护当前的倒塌MOSFET,而无需更改PWM计时器代码或注册。图11。LT1158MOSFET双控制器N。集成的各向异性磁传感器(AMR)ADA4571可以测量180°的旋转并测量精度WIthin 0.5°。传感器和传感器电源电压在2.7 V和5 V之间,并且在启用温度的补偿下,能源消耗仅为7 mA。传感器输出是两个类似的正弦波(VSIN,VCO),重点是2.5 V(5 V电源)。在将VSIN和VCO电压数字化后,它们可以通过简单的方程式成为角度:图12。ADA4571AMR传感器。为了测量360°的绝对旋转,可以将ADA4571与线性输出磁场传感器(走廊效应)(例如AD22151)一起使用。 AD22151设计用于单个5 V工作电源,其输出电压与垂直于包装的磁场线性成正比。在正常运行期间,该设备的最大输出为10 mA,并且可以检测具有不同增益量的双极或单极场。该传感器的优点反映在模拟输出电压中,并且可以轻松地添加到已经具有ANA的系统中对数测量功能,例如电流传感器输出和其他模拟角传感器。 AD22151垂直放置在ADA4571中,该ADA4571允许该软件融合输出,以检测直径 - 轴磁体的360°运动。像角度传感器一样,使用传感器对磁场的管理控制需要通过无扫帚的直接发动机对相电流进行精确测量。 AD8418是双向零推导的感觉放大器,非常适合此任务。该外部电流放大器的增益为20 v/v,在整个温度范围内运行时,可拒绝范围为-2 V至+70 V。放大器还可以通过推导检测双向电流。该设备的VS电源电压范围为2.7 V至5 V,模拟输出电压围绕VS/2。如果选择了5 V电源,则输出与ADA4571相同的中心为2.5 V。图13。AD8418电流传感器。如果您使用模拟输出传感器,结果必须成为数字域。尽管有多个ADC,但由于其八个同时采样通道,LTC2345特别适合发动机控制。采样与转换线中的单个上升边缘同步。在PWM中心对齐期间,相位电流和绝对角传感器的输出可以同时同步。单个5V供应简化了能源设计,消耗少于20 mA的消费。使用独立的数字逻辑输出电压,LTC2345可以与较低的电压微控制器,处理器或FPGA相互作用。模拟输入范围非常灵活,因此模拟(内部)输入通道可用于用硬件中的2.5 V电流和电流传感器删除Automát。根据所需的采样性能,可以使用SDO输出以几种手表速度从LTC2345获得数据。图14。功能框图LTC2345。结论离子在控制驱动系统中没有刷子的CC电动机的受欢迎程度需要更高级的算法,传感器和驱动电路。正弦和磁场管理的控制是两种相巧合策略,可以精确控制CC电动机,而无需刷子。两种策略都没有刷子的CC发动机的正确转子角度。需要精确测量它。没有正确的组件,这将非常困难。但是,ADA4571和AD22151简化了此测量。 LT1158在减少PWM电路时无需刷子即可简化CC发动机的三个相PWM驱动电路,并消除了对死时间计算的需求。 AD8418简化了绕组电流,而LTC2345简化了多个模拟传感器的数字化和同步。这些组件只是电动机控制应用的ADI投资组合的一部分。 3。下载相关的技术数据1。数据表https://share.eepw.com.cn/share/download/id/3957522, user manual https://share.eepw.com.cn/share/dowd/39575333, application note https://share.eepw.com.cn/share/dowload/id/3957544444 https://share.eepw.com.cn/share for for for for for for for for for for for for Autu